Study questions and exercises
Write the answers to the questions in a word document and send it to christian.stranne[at]geo.su.se. Your document should be named with your name and the moment according to the following convention: firstname_lastname_MomentX.docx
Once we received your answers you will get a correction sheet. Correct your own answers using the sheet and where you have questions, please write them in an email to the course email. When you have answered all questions you will also get a code to open the lecture(s) of the next Moment.
The study questions and exercises are only for your own learning and the code system is intended to help you following the course structure and to set your study pace. It is your own responsibility to follow this scheme.
Study questions and exercises on Moment 4
- Explain the basic principle of echo sounding.
- If you transmit an acoustic pulse with a frequency of 12 kHz, what is the minimum sampling frequency you must be able to handle with your A/D converter?
- Explain what may happen if you sample an acoustic analogue signal with a too low sampling frequency.
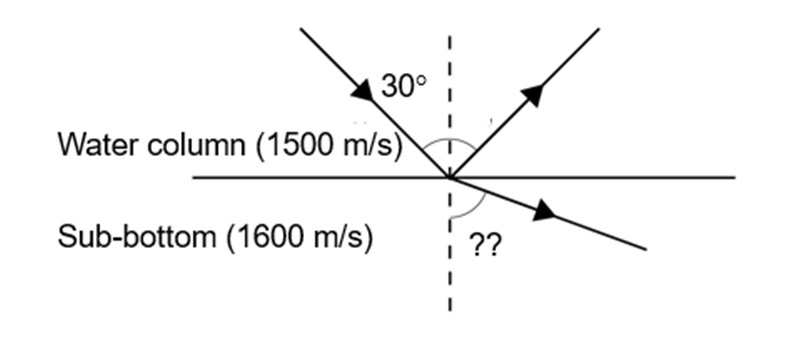
- Assume that you transmit an acoustic pulse that travels through the water column (sound velocity 1500 m/s) to echo back from the seafloor as well as continue penetrating into sub-bottom sediments (sound velocity 1600 m/s). If the incident angle of your pulse towards the seafloor is 30°, what is the angle of the continued path of the pulse through the sub-bottom sediments? (See sketch below)
- Why is it not possible to directly compare the sound level given at a music concert in dB with the sound level measured for an outgoing pulse from an echo sounder?
- How much more power is an underwater acoustic sound pulse measured to 15 db contain compared to one measured to 7 db?
- What is the sonar equation primarily providing an indication of?
- From which of the interfaces between the following geologic layers will the reflection of a sound pulse be strongest?
- a) From between a clay (v=1480 m/s, ρ=1.65 kg/dm3) on top of a sand (v=2000 m/s, ρ=1.9 kg/dm3).
- b) From between a sand (v=2000 m/s, ρ=1.9 kg/dm3) on top of a limestone (v=4000 m/s, ρ=2.6 kg/dm3).
- Estimate the vertical resolution of a 3.5 kHz conventional sub-bottom profiler in geologic layers where the sound pulse travels with a speed of 1500 m/s.
- Estimate the horizontal resolution considering the 1st Fresnel Zone for 10 kHz pulse used to map the seafloor with a depth of 1500 m under the transducers. Assume a sound speed profile with a harmonic mean of 1460 m/s.
- How does the 1st Fresnel zone compare with the footprint of a 2°x2° multibeam system used at the same water depth?
- Which of the following two pulses will attenuate faster: a) 5 kHz in 20° b) 2 kHz in 0°
- Explain why sloping seafloor not will be shown with the right slope when an echo sounder with a wide beam is used?
- Explain the main differences between a side-scan sonar and multibeam.
- What is slant range correction?
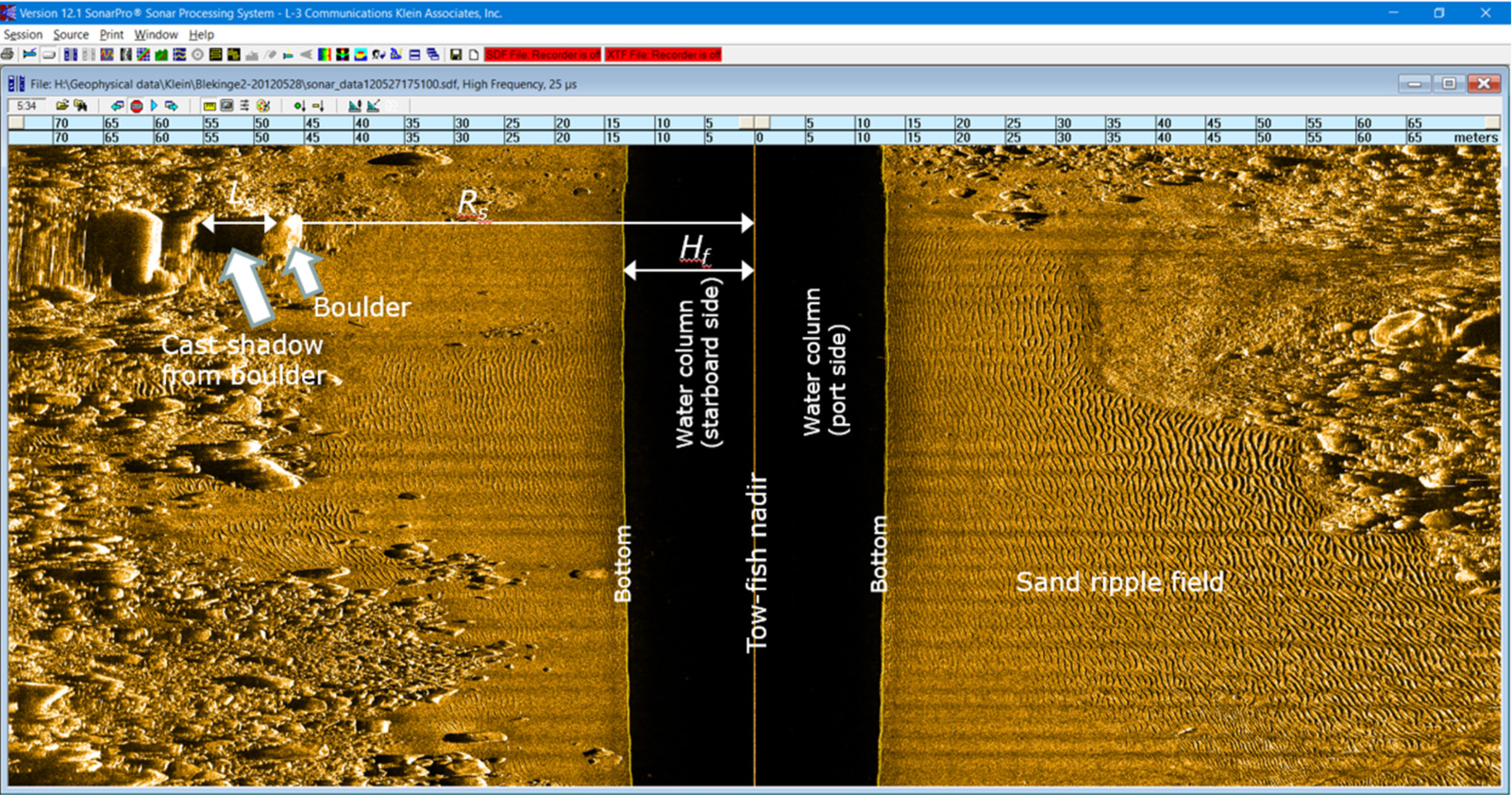
- Estimate the height of the target marked as a boulder in the side-scan sonar image.
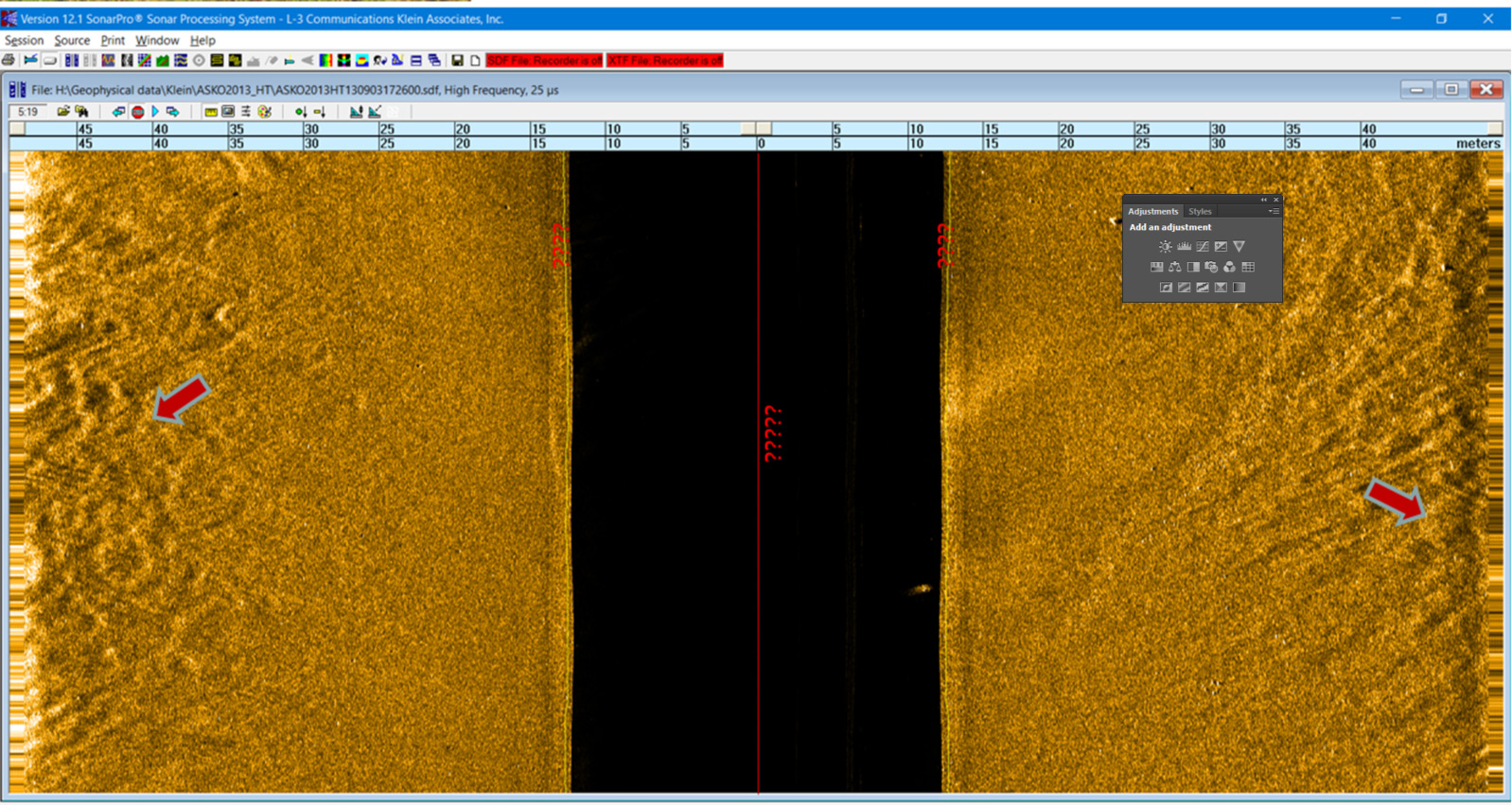
- Explain what the red errors are indicating in the side-scan image below and also what the features marked with question marks represent.
- Why are the transmitting array and receiving array mounted in a so-called Mills cross or Mills T for a multibeam sonar?
- If you are installing a multibeam system in a research vessel for mapping of the deepest trenches in the World Ocean, what is the approximate frequency range you should consider?
- What do we mean by multibeam mapping with 100% overlap?
- Mention one similarity and one difference between multibeam backscatter and side-scan sonar imagery.
- Explain the main difference between a conventional sub-bottom profiler and a chirp sub-bottom profiler.
- What makes it possible for a chirp to penetrate deeper into the sediments than a conventional sub-bottom profiler as well as providing a better resolution at the same time?
- Estimate the vertical resolution of a chirp sonar that uses a 4–10 kHz 10 ms long pulse. Resolution is here defined as the thinnest geologic layer the sonar is able to resolve.
- Explain the artefact in the multibeam image below. You see individual swaths from a rear view. Green beams are from starboard side and red from port. What is happening and what is the artefact caused by?
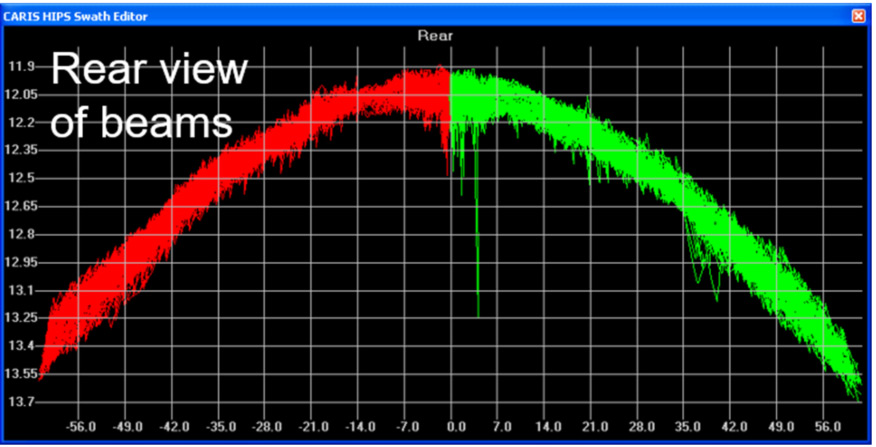
- How can you prevent the artefact in image above?
- What system is likely to produce a sub-bottom profile filled with hyperbolae from narrow objects on the seafloor: a) 3.5 kHz sub-bottom profiler with 20° beam width) 5 kHz sub-bottom profiler with 30° beam width.
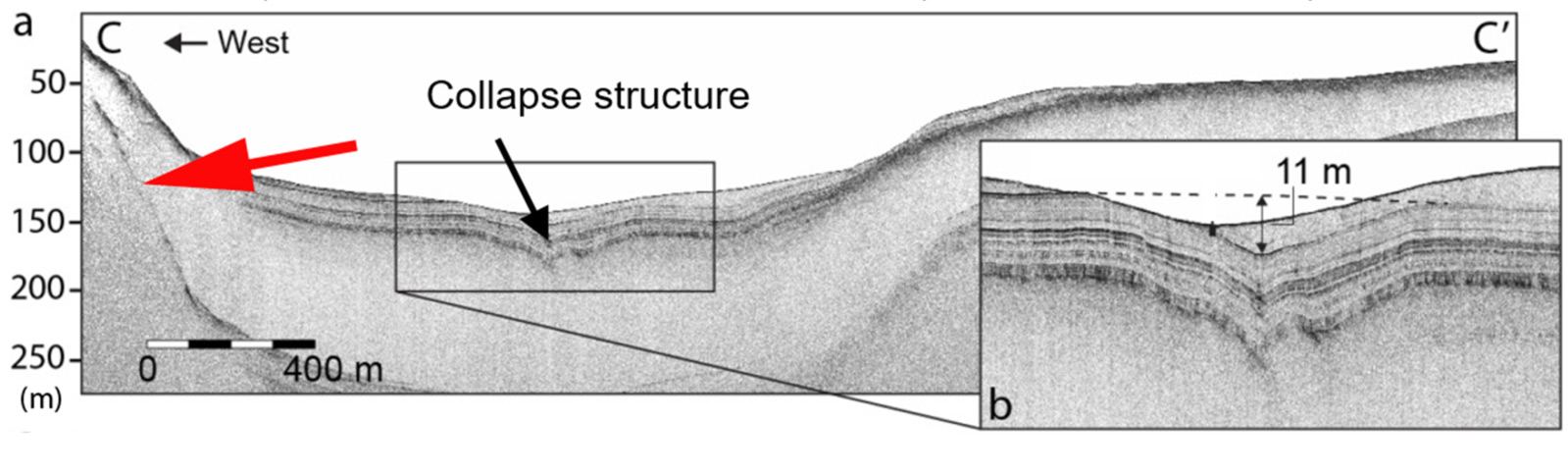
- What is reflector pointed to with a red arrow below caused by, and what is it commonly called?
- What is “pegleg multiple”?
- When does a so-called “bow-tie” reflector appear?